DARwIn robot humanoïde
cliquez sur les images pour les agrandir
DARwIn robot humanoïde
Les robots humanoïdes (ceux créés grâce à un réseau de neurones) peuvent parfois voir souvent paraître instables sur leurs jambes. En réalité, « il le font exprès », à chaque geste ils apprennent à mieux marcher.
Les gestes de DARwIn sont contrôlés par plusieurs réseaux neuronal. Au fur et à mesure qu'il effec-tue des gestes, les algorithmes d’apprentissage automatique qu'il contient imitant les connexions des neurones d’un cerveau humain, progressent et accumulent des modélisations nouvelles. Autrement dit il apprend comme nous somme capable de le faire.
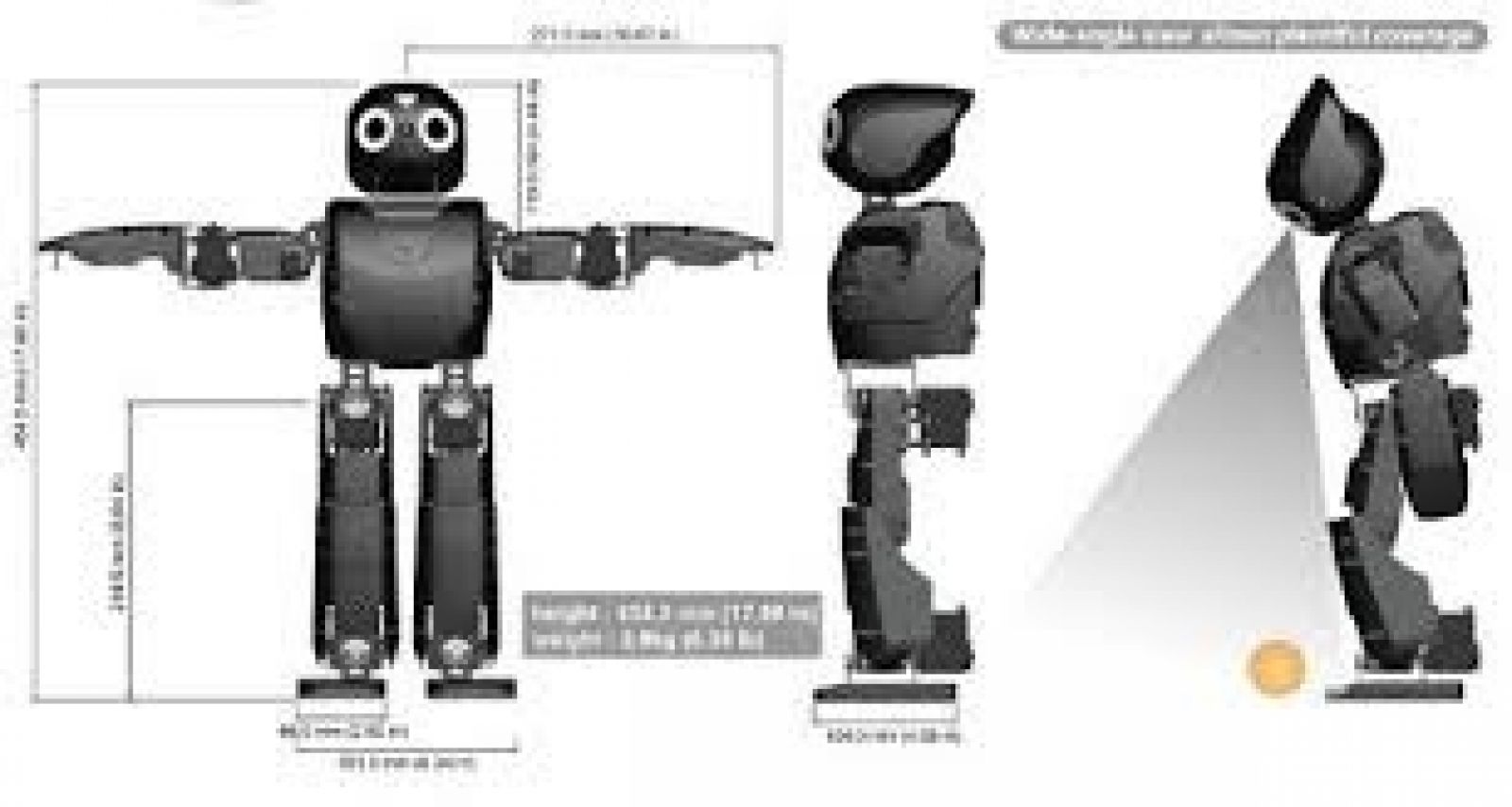
Spécifications techniques du robot humanoïde DARwIn-OP
Performances et caractéristiques générales du robot DARwIn-OP
• Hauteur : 45,45cm
• Poids : 2,9 kg
• Processeur principal Intel Atom Z530 à 1,6Ghz, 4GO mémoire flash SSD
• Carte contrôleur CM-730 avec ARM Cortex M3 à 72Mhz
• Vitesse de déplacement par défaut : 24cm/s
• Temps mis par le robot pour se relever quand il est sur le dos : 2.8 s
• Temps mis par le robot pour se relever quand il est sur le ventre: 3.9 s
Système de neurone formel :
Ceci est est une modélisation très rudimentaire du fonctionnement du neurone. L'interconnexion de ces ensembles d'unités fournit le réseau neuronal. Ce réseau présentant de nombreuses propriétés intéressantes, a comme principale propriétés celle d'apprendre à partir d'exemples. Ces réseaux ont également une capacité de généralisation leur permettant de traiter un cas ou de reconnaître une forme dans des conditions différentes de celles de l'apprentissage.

